TS-DAR Tutorial for HP35¶
Reference: Liu, B., Boysen, J.G., Unarta, I.C. et al. Exploring transition states of protein conformational changes via out-of-distribution detection in the hyperspherical latent space. Nat Commun 16, 349 (2025). https://doi.org/10.1038/s41467-024-55228-4
TS-DAR Framework: An Overview¶
In this notebook, we introduce Transition State identification via Dispersion and vAriational principle Regularized neural networks (TS-DAR), a computational framework that utilizes out-of-distribution (OOD) detection to accurately and simultaneously identify transition states involved in specific biomolecular conformational changes. TS-DAR leverages a deep learning model to map protein conformations from molecular dynamics (MD) simulations into a hyperspherical latent space. This low-dimensional representation preserves the essential kinetic information while still capturing the protein’s dynamic behavior. To distinguish metastable states from transition states, TS-DAR employs a VAMP-2 loss and dispersion loss function:
VAMP-2 Loss: Encourages the latent representation to capture the slow dynamics of the system by maximizing correlations between time-lagged data.
Dispersion Loss: Ensures that the latent space does not collapse by promoting a well-dispersed representation of the macrostates.
Before starting, make sure you have done the following:¶
1. Download and install Anaconda:¶
wget https://repo.anaconda.com/archive/Anaconda3-2024.06-1-Linux-x86_64.sh ./Anaconda3-2024.06-1-Linux-x86_64.sh #### 2. Create a new conda environment and install the ts-dar source code locally: conda create -n ts-dar python=3.9 conda activate ts-dar #### 3. Install dependencies !pip install matplotlib numpy==1.26.1 scipy==1.11.4 torch==1.13.1 tqdm==4.66.1 #### 4. Clone the repository !git clone https://github.com/xuhuihuang/ts-dar.git #### 5. Install the package !python -m pip install ./ts-dar
[1]:
import os
import numpy as np
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
from torch.utils.data.dataloader import DataLoader
from torch.utils.data import random_split
from tsdar.utils import set_random_seed
from tsdar.loss import Prototypes
from tsdar.model import TSDAR, TSDARLayer, TSDARModel, TSDAREstimator
from tsdar.dataprocessing import Preprocessing
Load the HP35 Data:¶
[2]:
data = []
for i in range(153):
filename = "./HP35_data/ftraj_%03d.npy" % i
if os.path.exists(filename): # Check if file exists
data.append(np.load(filename))
else:
print(f"Warning: {filename} not found.")
Visualize the VAMP-2 Loss:¶
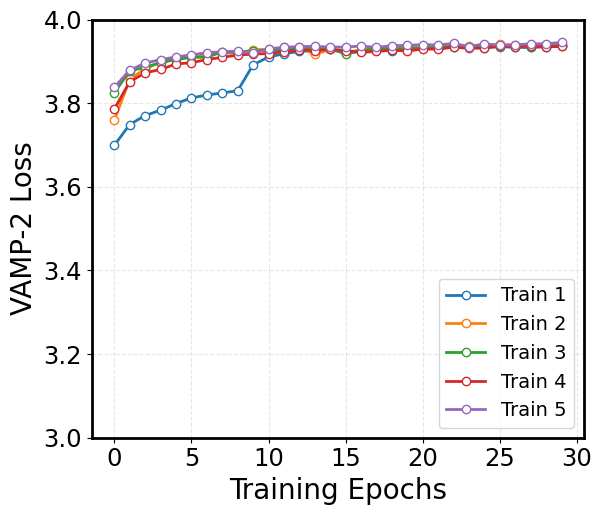
The VAMP-2 loss is derived from the Variational Approach for Markov Processes, which aims to extract the slow collective variables from the data. Given an MD trajectory of length \(T\), a batch of transition pairs \(\{(x_t, x_{t+\tau})\}_{t=1}^b\) with lag time, \(\tau\), is sampled. This produces two batches of data: \(\mathbf{B} = [x_1, x_2, \dots, x_b]^T\) and \(\mathbf{\hat{B}} = [x_{1+\tau}, x_{2+\tau}, \dots, x_{b+\tau}]^T\), which are fed into two parallel network lobes with shared parameters. Each lobe outputs SoftMax-transformed basis functions (\(\chi\)) applied to the input features, yielding: \(\mathbf{X} = [\chi(x_1), \dots, \chi(x_b)]^T\) and \(\mathbf{Y} = [\chi(x_{1+\tau}), \dots, \chi(x_{b+\tau})]^T\). The remove-mean time-instantaneous (\(\bar{\mathbf{C}}_{00}\) and \(\bar{\mathbf{C}}_{11}\)) and time-lagged (\(\bar{\mathbf{C}}_{01}\)) correlation matrices can then be calculated as follows:
where \(\boldsymbol{\pi}_0\) and \(\boldsymbol{\pi}_1\) are mean vectors of \(\mathbf{X}\) and \(\mathbf{Y}\), respectively, given by: \(\boldsymbol{\pi}_0\) = \(\frac{1}{T - \tau} \mathbf{X}^T \mathbf{1}\) and \(\boldsymbol{\pi}_1\) = \(\frac{1}{T - \tau} \mathbf{Y}^T \mathbf{1}\). These correlation matrices are then used to calculate the VAMP-2 loss, which is defined as:
Minimizing this loss drives the model to learn latent features that capture the slow dynamical modes in the molecular system.
[21]:
val_vamp = []
for i in range(5):
j=i+1
file_path=rf'./trained_model_examples/{j}/validation_vamp.npy'
dip = np.load(file_path)
val_vamp.append(dip)
# Define custom colors for the line and markers
line_color = 'royalblue'
marker_face = 'white'
plt.rcParams['font.size'] = 35
# Plot with custom colors, line width, and markers
fig = plt.figure(figsize=(8, 6))
for idx, dip in enumerate(val_vamp):
plt.plot(dip, linewidth=2, marker='o', markersize=6, markerfacecolor=marker_face, linestyle='-', label=f'Train {idx + 1}')
# Set the axis labels
plt.xlabel('Training Epochs', fontsize=20)
plt.ylabel('VAMP-2 Loss', fontsize=20)
plt.yticks(np.arange(3, 4.1, 0.2))
plt.xticks(np.arange(0, 35, 5))
# Customize tick parameters for readability
plt.xticks(fontsize=17.5)
plt.yticks(fontsize=17.5)
plt.gca().set_box_aspect(0.85)
# Add a dashed grid to improve the readability of the plot
plt.grid(alpha=0.3, linestyle='--')
plt.legend(loc='lower right', fontsize=14, markerscale=1, ncol=1)
# Adjust the layout to ensure everything fits well
plt.tight_layout()
# Display the plot
plt.show()
Visualize the Dispersion Loss:¶
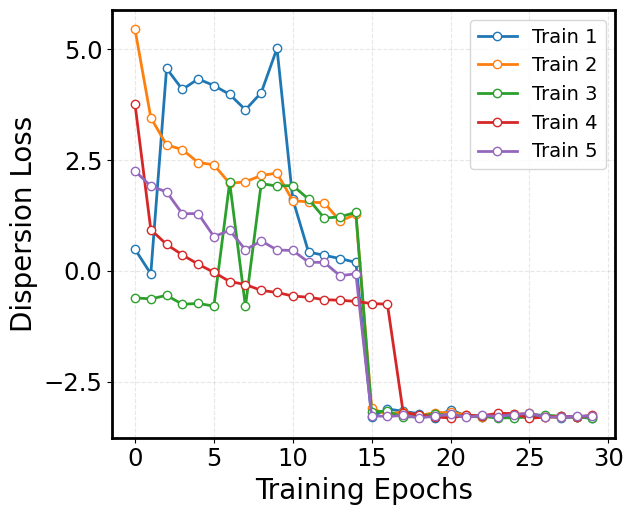
While the VAMP-2 loss focuses on capturing the slow dynamics, it can sometimes result in a latent space where the features collapse to similar values. To counteract this, we incorporate a dispersion loss that encourages diversity in the latent space. One way to formulate the dispersion loss is by ensuring that the pairwise distances between latent representations are close to a target mean distance. The dispersion loss is defined as:
where:
\(C\) corresponds to the number of states.
\(\mu_i\) is a unit vector representing the mean direction of all conformations (i.e., the state center) in state \(i\).
\(\sigma\) is a scaling hyperparameter, which is specifically defined as 0.1.
\(\mathbf{1}_{\{j \neq i\}}\) is an indicator function that equals 1 when \(j \neq i\) (i.e., excluding self-similarity) and 0 when \(j = i\).
This loss penalizes deviations from the target dispersion, ensuring that the latent features remain well-separated and informative.
[23]:
# Define custom colors for the line and markers
line_color = 'royalblue'
marker_face = 'white'
#marker_edge = 'royalblue'
val_dip = []
for i in range(5):
j=i+1
file_path=f'./trained_model_examples/{j}/validation_dis.npy'
dip = np.load(file_path)
val_dip.append(dip)
plt.rcParams['font.size'] = 35
plt.figure(figsize=(8, 6))
for idx, dip in enumerate(val_dip):
plt.plot(dip, linewidth=2, marker='o', markersize=6, markerfacecolor=marker_face, linestyle='-', label=f'Train {idx + 1}')
# Set the axis labels
plt.xlabel('Training Epochs', fontsize=20)
plt.ylabel('Dispersion Loss', fontsize=20)
#plt.ylim(0, 2.25)
#plt.yticks(np.arange(0, 2.1, 0.5))
plt.xticks(np.arange(0, 35, 5))
# Customize tick parameters for readability
plt.xticks(fontsize=17.5)
plt.yticks(fontsize=17.5)
plt.gca().set_box_aspect(0.85)
plt.legend(loc='upper right', fontsize=14, markerscale=1, ncol=1)
# Add a dashed grid to improve the readability of the plot
plt.grid(alpha=0.3, linestyle='--')
# Adjust the layout to ensure everything fits well
plt.tight_layout()
# Display the plot
plt.show()
[5]:
# Initialize with specified hidden layer sizes and number of output states
lobe = TSDARLayer([528,200,100,50,25,10,3],n_states=4)
# Load a pre-trained model - the model was trained for 30 epochs
lobe.load_state_dict(torch.load('./trained_model_examples/3/model_30epochs.pytorch', map_location=torch.device('cpu')))
tsdar_model = TSDARModel(lobe=lobe)
# Use the model to transform the input data into low-dimensional representations on the surface of a hypersphere
features = tsdar_model.transform(data,return_type='hypersphere_embs')
# Use the same model to assign each frame in the input trajectory to one of the learned states
lumped_trajs = tsdar_model.transform(data,return_type='states') # State Assignment
[6]:
# Initialize the TS-DAR Estimator to compute metastable state centers
tsdar_estimator = TSDAREstimator(tsdar_model).fit(data)
# These scores indicate how far each point is from its assigned state's center, which helps detect rare conformations
ood_scores = tsdar_estimator.ood_scores
# Extract the learned centers (means) of each state in the latent hypersphere embedding space
state_centers = tsdar_estimator.state_centers
print(state_centers)
[[-0.27191687 -0.83422726 -0.47971457]
[-0.5415171 0.7496386 -0.38052765]
[-0.16964732 -0.0948611 0.9809287 ]
[ 0.9731338 0.179747 -0.14388044]]
StateAnalyzer:¶
The StateAnalyzer identifies key frames from MD data by identifying those closest to state centers and high OOD-scoring frames near state transitions in a learned embedding space.
[7]:
import numpy as np
import pandas as pd
import warnings
class StateAnalyzer:
def __init__(self, state_centers, features, ood_scores):
"""
Initialize the StateAnalyzer with state centers, features, and OOD scores.
Parameters:
- state_centers: List or array of state centers.
- features: List of trajectories, where each trajectory is a list of feature vectors.
- ood_scores: List of OOD scores corresponding to the features.
"""
self.state_centers = state_centers
self.features = features
self.ood_scores = ood_scores
self.flatten_features = np.concatenate(features)
self.flatten_ood_scores = np.concatenate(ood_scores)
self.indices = self._flatten_features()
def _flatten_features(self):
"""
Keep track of (traj_idx, frame_idx, flatten_idx).
In case that different trajectories have different lengths, have careful record of the indices.
Returns:
- flatten_features: Flattened list of feature vectors.
- indices: List of tuples containing (traj_idx, frame_idx, flatten_idx).
"""
indices = []
flatten_idx = 0
for traj_idx, traj in enumerate(self.features):
for frame_idx, f in enumerate(traj):
indices.append((traj_idx, frame_idx, flatten_idx))
flatten_idx += 1
return indices
def find_center_frames(self, center_idx=0, top_n=10):
"""
Find the indices of the closest frames to each state center.
Parameters:
- num_centers: Number of state centers (default: 4).
- top_n: Number of closest frames to return for each center (default: 10).
Returns:
- center_frames: DataFrame containing the closest frames for each state center.
"""
results = []
diff = np.linalg.norm(self.flatten_features - self.state_centers[center_idx], axis=1)
# Find the indices of the top_n closest frames
k = np.argsort(diff)[:top_n]
# Extract trajectory, frame, and flattened indices
closest_entries = [(center_idx, *self.indices[i]) for i in k]
results.extend(closest_entries)
# Create a DataFrame to store the results
center_frames = pd.DataFrame(results, columns=["Center_Index", "Trajectory", "Frame", "Flatten_Index"])
return center_frames
def find_transition_states(self, state_idx_1, state_idx_2, threshold=0.25, top_n=10):
"""
Find the indices of the transition states with the highest OOD scores between two states.
Parameters:
- state_idx_1: Index of the first state.
- state_idx_2: Index of the second state.
- threshold: Distance threshold for considering a feature as close to the midpoint (default: 0.25).
Note: the threshold can't be larger than sqrt(2), not recommended to be larger than 1
- top_n: Number of top transition states to return (default: 10).
Returns:
- selected_indices: Indices of the top transition states.
- selected_ood_scores: OOD scores of the top transition states.
"""
# Compute the midpoint between the two state centers and normalize it
state_centers_mid = (self.state_centers[state_idx_1] + self.state_centers[state_idx_2]) / 2
state_centers_mid /= np.linalg.norm(state_centers_mid) # Normalize
# Find indices where the feature is within the threshold distance from state_centers_mid
close_indices = [i for i in range(len(self.flatten_features))
if np.linalg.norm(self.flatten_features[i] - state_centers_mid) < threshold]
# Check if there are enough close frames
if len(close_indices) < top_n:
warnings.warn(
f"Only {len(close_indices)} close frames found (requested {top_n}). "
"Returning all available frames. Try increasing the threshold.",
UserWarning,
)
top_n = len(close_indices) # Adjust top_n to the number of available frames
# Get the OOD scores corresponding to these indices
ood_scores_filtered = self.flatten_ood_scores[close_indices]
# Get the indices of the top N highest OOD scores from the selected frames
top_n_indices = np.argsort(ood_scores_filtered)[-top_n:]
# Retrieve the corresponding original indices
selected_indices = [close_indices[i] for i in top_n_indices]
# Get the corresponding OOD scores
selected_ood_scores = self.flatten_ood_scores[selected_indices]
# Create a DataFrame to store the results
transition_data = {
"State_1_Index": state_idx_1,
"State_2_Index": state_idx_2,
"OOD_Score": selected_ood_scores,
"Flatten_Index": selected_indices,
}
# Add trajectory and frame indices if available
if hasattr(self, 'indices'):
transition_data["Trajectory"] = [self.indices[i][0] for i in selected_indices]
transition_data["Frame"] = [self.indices[i][1] for i in selected_indices]
transition_df = pd.DataFrame(transition_data)
return transition_df
[8]:
# Initialize the StateAnalyzer
analyzer = StateAnalyzer(state_centers, features, ood_scores)
# Find the closest frames to each state center
center_idx = 2
center_frames = analyzer.find_center_frames(center_idx=center_idx)
print(f"Closest frames to state center {center_idx}:")
print(center_frames.to_string(index=False))
Closest frames to state center 2:
Center_Index Trajectory Frame Flatten_Index
2 21 1215 211215
2 150 2809 1502809
2 21 2684 212684
2 150 3540 1503540
2 151 7972 1517972
2 21 3911 213911
2 128 7181 1287181
2 45 9219 459219
2 0 4326 4326
2 150 9405 1509405
Find the Transition State Conformations Between State 1 and State 2:¶
[9]:
state_idx_1 = 0
state_idx_2 = 1
transition_states = analyzer.find_transition_states(state_idx_1, state_idx_2, threshold=0.5)
print(f"Transition state between state {state_idx_1} and state {state_idx_2}:")
print(transition_states.to_string(index=False))
Transition state between state 0 and state 1:
State_1_Index State_2_Index OOD_Score Flatten_Index Trajectory Frame
0 1 0.424043 1127138 112 7138
0 1 0.424043 1127162 112 7162
0 1 0.424273 196158 19 6158
0 1 0.424390 455435 45 5435
0 1 0.424422 455541 45 5541
0 1 0.424532 196217 19 6217
0 1 0.424601 604530 60 4530
0 1 0.424729 195996 19 5996
0 1 0.425174 196649 19 6649
0 1 0.425725 1126842 112 6842
Find the Transition State Conformations Between State 2 and State 3:¶
[10]:
state_idx_1 = 1
state_idx_2 = 2
transition_states = analyzer.find_transition_states(state_idx_1, state_idx_2)
print(f"Transition state between state {state_idx_1} and state {state_idx_2}:")
print(transition_states.to_string(index=False))
Transition state between state 1 and state 2:
State_1_Index State_2_Index OOD_Score Flatten_Index Trajectory Frame
1 2 0.446738 180716 18 716
1 2 0.446771 1501421 150 1421
1 2 0.446950 460201 46 201
1 2 0.447108 1123185 112 3185
1 2 0.447181 224263 22 4263
1 2 0.447375 224250 22 4250
1 2 0.447526 103890 10 3890
1 2 0.447535 1287784 128 7784
1 2 0.448049 289471 28 9471
1 2 0.448070 103844 10 3844
Find the Transition State Conformations Between State 2 and State 4:¶
[11]:
state_idx_1 = 1
state_idx_2 = 3
transition_states = analyzer.find_transition_states(state_idx_1, state_idx_2, threshold=0.5)
print(f"Transition state between state {state_idx_1} and state {state_idx_2}:")
print(transition_states.to_string(index=False))
Transition state between state 1 and state 3:
State_1_Index State_2_Index OOD_Score Flatten_Index Trajectory Frame
1 3 0.471023 1484781 148 4781
1 3 0.471358 1484847 148 4847
1 3 0.472856 41614 4 1614
1 3 0.472881 1484808 148 4808
1 3 0.478483 41701 4 1701
1 3 0.479567 41628 4 1628
1 3 0.482969 41615 4 1615
1 3 0.483645 41700 4 1700
1 3 0.485224 41702 4 1702
1 3 0.489177 41626 4 1626
Compute the Angles Between State Center Vectors:¶
angle_between_vectorscomputes and prints the pairwise angles (in radians) between the state center vectors in a high dimensional embedding space to assess how uniformly dispersed the learned states are.
[12]:
def angle_between_vectors(v1, v2):
"""
Calculate the angle between two vectors in radians.
Parameters:
v1 (array-like): First vector.
v2 (array-like): Second vector.
Returns:
float: Angle in radians.
"""
# Convert inputs to numpy arrays
v1 = np.array(v1)
v2 = np.array(v2)
# Calculate dot product and magnitudes
dot_product = np.dot(v1, v2)
magnitude_v1 = np.linalg.norm(v1)
magnitude_v2 = np.linalg.norm(v2)
# Calculate cosine of the angle
cos_theta = dot_product / (magnitude_v1 * magnitude_v2)
# Handle potential numerical precision issues
cos_theta = np.clip(cos_theta, -1.0, 1.0)
# Calculate angle in radians
angle_radians = np.arccos(cos_theta)
return angle_radians
# Well-dispersed data should have the angles between center vectors to be almost identical
# Useful when the dimension is larger than 3 or the number of state is larger than 4
n_states = 4
for i in range(n_states):
for j in range(i):
print(angle_between_vectors(state_centers[i], state_centers[j]))
1.8708554530644315
1.9233548700192482
1.9310537054099948
1.9236102600048615
1.9150272270878264
1.8999867164522164
[13]:
xx = [frame[0] for traj in features for frame in traj]
yy = [frame[1] for traj in features for frame in traj]
zz = [frame[2] for traj in features for frame in traj]
scores = [score for traj in ood_scores for score in traj]
print("Length of xx:", len(xx))
print("Length of yy:", len(yy))
print("Length of ood_scores:", len(scores))
Length of xx: 1526041
Length of yy: 1526041
Length of ood_scores: 1526041
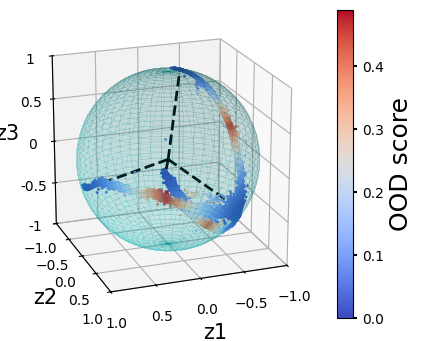
Visualize the Results in the Hyperspherical Latent Space:¶
[14]:
r = 1
pi = np.pi
cos = np.cos
sin = np.sin
phi, theta = np.mgrid[0.0:pi:100j, 0.0:2.0*pi:100j]
x = r*sin(phi)*cos(theta)
y = r*sin(phi)*sin(theta)
z = r*cos(phi)
plt.rcParams['figure.figsize'] = (5,4)
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.plot_surface(
x, y, z, rstride=2, cstride=2, color='c', alpha=0.1, linewidth=100,antialiased=False)
ax.plot([0,state_centers[0,0]],[0,state_centers[0,1]],[0,state_centers[0,2]],linewidth=2,color='black',linestyle='--')
ax.plot([0,state_centers[1,0]],[0,state_centers[1,1]],[0,state_centers[1,2]],linewidth=2,color='black',linestyle='--')
ax.plot([0,state_centers[2,0]],[0,state_centers[2,1]],[0,state_centers[2,2]],linewidth=2,color='black',linestyle='--')
ax.plot([0,state_centers[3,0]],[0,state_centers[3,1]],[0,state_centers[3,2]],linewidth=2,color='black',linestyle='--')
c = ax.scatter(xx,yy,zz,c=scores,s=1,alpha=1,cmap='coolwarm')
cb = fig.colorbar(c)
cb.ax.tick_params(labelsize=10,length=3,width=1.5)
cb.set_label('OOD score',fontsize=18)
ax.set_xlim([-1,1])
ax.set_ylim([-1,1])
ax.set_zlim([-1,1])
ax.set_xticks([-1,-0.5,0,0.5,1])
ax.set_yticks([-1,-0.5,0,0.5,1])
ax.set_zticks([-1,-0.5,0,0.5,1],[-1,-0.5,0,0.5,1])
ax.set_aspect("equal")
ax.tick_params(axis="both",labelsize=10,direction='out',length=7.5,width=2.5)
ax.set_xlabel('z1',fontsize=15)
ax.set_ylabel('z2',fontsize=15)
ax.set_zlabel('z3',fontsize=15)
ax.view_init(elev=20, azim=70) # Adjust these two values to have better views
[15]:
# This performs bootstrap resampling of transition probability matrices (TPMs) for a Markov State Model (MSM)
# using the msmbuilder package, to estimate uncertainty in the model across a range of lag times.
from msmbuilder.msm import MarkovStateModel
n_states = 4 # Number of discrete states in the MSM
num_runs = 50 # Number of bootstrap replicates
num_samples_per_run = 160 # How many trajectories to sample per bootstrap
lt = np.arange(100, 1501, 100) # Lag times to evaluate (e.g. 100, 200, ..., 1500)
# TPM generation function
def generate_TPM(trajs, lagtime, n_states=4,):
TPM = []
for i in range(len(lagtime)):
msm_macro = MarkovStateModel(n_timescales=3, lag_time=lagtime[i],
ergodic_cutoff='on', reversible_type='mle', verbose=False)
msm_macro.fit(trajs)
if len(msm_macro.transmat_) != n_states:
return None
TPM.append(msm_macro.transmat_)
return np.array(TPM)
# Bootstrap loop
bootstrap_TPM = np.zeros((num_runs, len(lt), n_states, n_states))
for i in range(num_runs):
bootstrap_indices = np.random.choice(range(len(lumped_trajs)), size=num_samples_per_run, replace=True)
bootstrap_trajs = [lumped_trajs[i] for i in bootstrap_indices]
temp_TPM = generate_TPM(bootstrap_trajs, lagtime=lt)
if temp_TPM is None:
continue
bootstrap_TPM[i] = temp_TPM
print('Run {} is complete'.format(i))
Run 0 is complete
Run 1 is complete
Run 2 is complete
Run 3 is complete
Run 5 is complete
Run 6 is complete
Run 8 is complete
Run 9 is complete
Run 10 is complete
Run 11 is complete
Run 12 is complete
Run 13 is complete
Run 14 is complete
Run 15 is complete
Run 16 is complete
Run 17 is complete
Run 18 is complete
Run 19 is complete
Run 20 is complete
Run 21 is complete
Run 22 is complete
Run 23 is complete
Run 24 is complete
Run 25 is complete
Run 26 is complete
Run 28 is complete
Run 29 is complete
Run 30 is complete
Run 31 is complete
Run 32 is complete
Run 33 is complete
Run 34 is complete
Run 35 is complete
Run 36 is complete
Run 37 is complete
Run 38 is complete
Run 39 is complete
Run 40 is complete
Run 41 is complete
Run 42 is complete
Run 44 is complete
Run 46 is complete
Run 47 is complete
Run 48 is complete
Run 49 is complete
Create a Markov State Model (MSM):¶
n_timescales: number of implied timescales to estimate
lag_time: lag between transitions used to build the model
ergodic_cutoff: ensures all states are connected (ergodic)
reversible_type: maximum likelihood estimator for reversibility
verbose: suppress output
[16]:
# Set the lag time for the MSM.
lagtime = 100 # In simulation steps; corresponds to 20 ns
msm = MarkovStateModel(n_timescales=6, lag_time=lagtime, ergodic_cutoff='on',
reversible_type='mle', verbose=False)
# Fit the MSM to the lumped trajectories (discrete state assignments per trajectory)
msm.fit(lumped_trajs)
# Extract the transition probability matrix (TPM) from the fitted MSM
transmat = msm.transmat_
# Define the number of TPM propagations to evaluate (i.e., powers of the TPM), up to 1500 simulation steps
order_parameter = np.arange(1, int(1500 / lagtime + 1))
# Convert timepoints from simulation steps to nanoseconds (0.2 ns per step)
msm_time = order_parameter * lagtime * 0.2
# Compute the TPM raised to successive powers (i.e., TPM ** i), giving transition probabilities over longer times
# Each TPM ** i gives the probability of transitioning from state j to k in (i * lagtime) steps
msm_TPM = []
for i in order_parameter:
msm_TPM.append(np.linalg.matrix_power(transmat, i))
# Convert the list of TPMs into a NumPy array for further analysis or plotting
msm_TPM = np.array(msm_TPM)
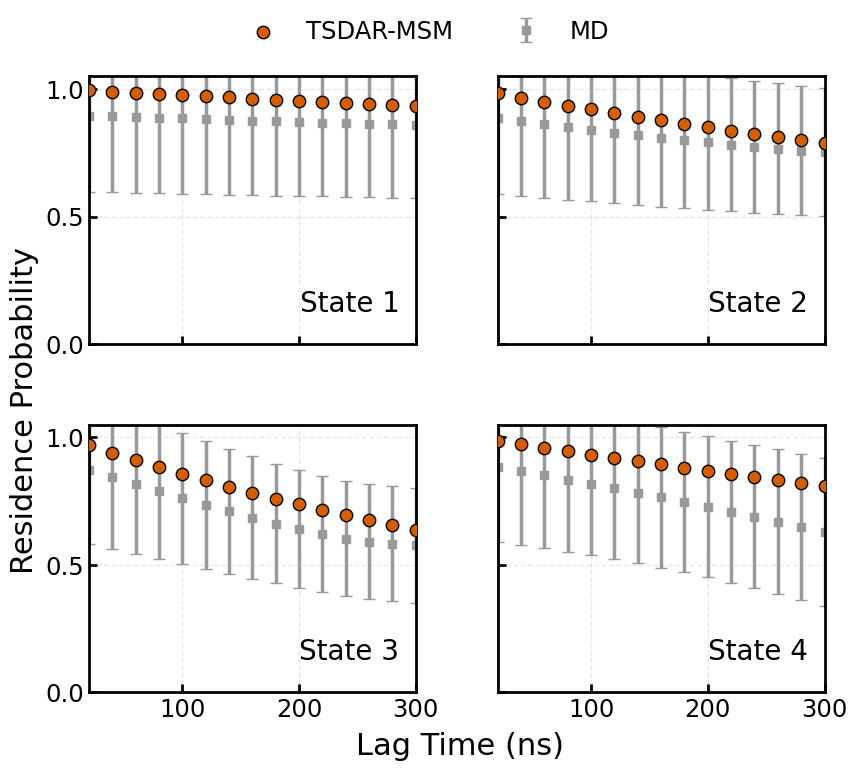
Perform a Chapman-Kolmogorov (CK) Test:¶
This test is done to evaluate the markovian quality of the model by comparing the MSM-predicted multi-step residence probabilities (from ``msm_TPM``) with the Empirical bootstrapped MD estimates (from ``bootstrap_TPM``)
[17]:
import matplotlib.pyplot as plt
import numpy as np
# Font and axis style
plt.rcParams['font.size'] = 17.5
plt.rcParams['axes.linewidth'] = 2
# Compute mean and std
TPM_mean = np.mean(bootstrap_TPM, axis=0)
TPM_std = np.std(bootstrap_TPM, axis=0)
color_msm = '#D55E00'
color_md = '#999999' # gray
# Create subplots
fig, axes = plt.subplots(2, 2, figsize=(9, 7.5), sharex=True, sharey=True)
axes = axes.flatten()
for i in range(n_states):
ax = axes[i]
# MD error bars
ax.errorbar(x=lt * 0.2, y=TPM_mean[:, i, i], yerr=TPM_std[:, i, i], fmt='s', capsize=4, elinewidth=2.5, markersize=6,
color=color_md, ecolor=color_md, zorder=1, label='MD' if i == 0 else None)
# MSM predictions as dark blue circles
ax.scatter(msm_time, msm_TPM[:, i, i], c=color_msm, edgecolor='k', s=80, zorder=3, label='TSDAR-MSM' if i == 0 else None)
# State label
ax.text(0.95, 0.10, f'State {i+1}', ha='right', va='bottom', transform=ax.transAxes, fontsize=20)
ax.set_ylim(0, 1.05)
ax.set_xlim(min(lt * 0.2), max(lt * 0.2))
ax.set_xticks([100, 200, 300])
ax.set_yticks([0.0, 0.5, 1.0])
ax.tick_params(axis='both', direction='in', width=2, length=6)
# Add clean gridlines
ax.grid(True, linestyle='--', linewidth=1, alpha=0.3)
# Border thickness
for spine in ax.spines.values():
spine.set_linewidth(2)
# Axis labels
fig.text(0.54, 0.04, 'Lag Time (ns)', ha='center', fontsize=22)
fig.text(0.04, 0.5, 'Residence Probability', va='center', rotation='vertical', fontsize=22)
# Unified legend
handles, labels = [], []
for ax in axes:
for h, l in zip(*ax.get_legend_handles_labels()):
if l not in labels:
handles.append(h)
labels.append(l)
fig.legend(handles, labels, loc='upper center', bbox_to_anchor=(0.5, 1.05),
ncol=2, fontsize=17.5, frameon=False)
plt.tight_layout(rect=[0.05, 0.05, 1, 0.98])
plt.subplots_adjust(wspace=0.25, hspace=0.3)
plt.show()
[ ]: