TS-DAR Tutorial for PP2A¶
Reference: Liu, B., Boysen, J.G., Unarta, I.C. et al. Exploring transition states of protein conformational changes via out-of-distribution detection in the hyperspherical latent space. Nat Commun 16, 349 (2025). https://doi.org/10.1038/s41467-024-55228-4
TS-DAR Framework: An Overview¶
In this notebook, we introduce Transition State identification via Dispersion and vAriational principle Regularized neural networks (TS-DAR), a computational framework that utilizes out-of-distribution (OOD) detection to accurately and simultaneously identify transition states involved in specific biomolecular conformational changes. TS-DAR leverages a deep learning model to map protein conformations from molecular dynamics (MD) simulations into a hyperspherical latent space. This low-dimensional representation preserves the essential kinetic information while still capturing the protein’s dynamic behavior. To distinguish metastable states from transition states, TS-DAR employs a VAMP-2 loss and dispersion loss function:
VAMP-2 Loss: Encourages the latent representation to capture the slow dynamics of the system by maximizing correlations between time-lagged data.
Dispersion Loss: Ensures that the latent space does not collapse by promoting a well-dispersed representation of the macrostates.
Before starting, make sure you have done the following:¶
1. Download and install Anaconda:¶
wget https://repo.anaconda.com/archive/Anaconda3-2024.06-1-Linux-x86_64.sh ./Anaconda3-2024.06-1-Linux-x86_64.sh #### 2. Create a new conda environment and install the ts-dar source code locally: conda create -n ts-dar python=3.9 conda activate ts-dar #### 3. Install dependencies !pip install matplotlib numpy==1.26.1 scipy==1.11.4 torch==1.13.1 tqdm==4.66.1 #### 4. Clone the repository !git clone https://github.com/xuhuihuang/ts-dar.git #### 5. Install the package !python -m pip install ./ts-dar
[16]:
import os
import numpy as np
import torch
import torch.nn as nn
from matplotlib import pyplot as plt
from torch.utils.data.dataloader import DataLoader
from torch.utils.data import random_split
from tsdar.utils import set_random_seed
from tsdar.loss import Prototypes
from tsdar.model import TSDAR, TSDARLayer, TSDAREstimator
from tsdar.dataprocessing import Preprocessing
[17]:
if torch.cuda.is_available():
device = torch.device('cuda')
print('cuda is available')
else:
device = torch.device('cpu')
print('cpu')
cpu
[18]:
def load_xvg(filename):
with open(filename) as f:
lines = [line for line in f if not line.startswith(('@', '#'))]
data = np.genfromtxt(lines)
return data
Load the PP2A Data:¶
[19]:
data = []
for i in range(10):
tmp = np.load(rf'./PP2A_data/spec_osasis_filter_1000_select_CA_pairwise_distances_WT_{i}_traj.npy')
print(np.shape(tmp))
data.append(tmp)
phy_coord = []
for i in range(10):
tmp = load_xvg(rf'./PP2A_data/Carm_SLiM_dist_MN_Carm_572_574_dist_WT_{i}_traj.xvg')[:, 1]
phy_coord.append(tmp)
(11701, 1000)
(11930, 1000)
(11925, 1000)
(11948, 1000)
(11911, 1000)
(12008, 1000)
(11997, 1000)
(11952, 1000)
(12053, 1000)
(11933, 1000)
Preprocessing Molecular Dynamics Data:¶
Preprocess the original trajectories to create datasets for training.
[5]:
pre = Preprocessing(dtype=np.float32)
dataset = pre.create_dataset(lag_time=10,data=data)
Training the TS-DAR Model:¶
We now train a TS-DAR Model to learn a latent space representation of the protein structures. This consists of (a) feature extraction: protein structures are transformed into a suitable representation (e.g., coordinates, distances, or angles between atoms); (b) encoder training: The encoder learns to compress the input conformations (high-dimensional protein structures) into a lower-dimensional latent space.
[ ]:
# The output for this code is provided in ./trained_model_examples/, but we include the code for your reference.
set_random_seed(0)
for i in range(1,11):
import os
os.makedirs(rf'./new_trained_models/{i}', exist_ok=True) #create new folder for new training runs
os.chdir(rf'./new_trained_models/{i}')
val = int(len(dataset)*0.10)
train_data, val_data = torch.utils.data.random_split(dataset, [len(dataset)-val, val]) #way the dataset is split depends on the underlying pseudo-random number generator
loader_train = DataLoader(train_data, batch_size=1000, shuffle=True)
loader_val = DataLoader(val_data, batch_size=len(val_data), shuffle=False)
lobe = TSDARLayer([1000,550,250,100,50,25,2],n_states=2)
lobe = lobe.to(device=device)
tsdar = TSDAR(lobe = lobe, learning_rate = 1e-3, device = device, mode = 'regularize', beta=0.01 , feat_dim=2, n_states=2, pretrain=50)
tsdar_model = tsdar.fit(loader_train, n_epochs=60, validation_loader=loader_val).fetch_model()
validation_vamp = tsdar.validation_vamp
validation_dis = tsdar.validation_dis
validation_prototypes = tsdar.validation_prototypes
training_vamp = tsdar.training_vamp
training_dis = tsdar.training_dis
np.save(('validation_vamp.npy'),validation_vamp)
np.save(('validation_dis.npy'),validation_dis)
np.save(('validation_prototypes.npy'),validation_prototypes)
np.save(('training_vamp.npy'),training_vamp)
np.save(('training_dis.npy'),training_dis)
hypersphere_embs = tsdar_model.transform(data=data,return_type='hypersphere_embs')
metastable_states = tsdar_model.transform(data=data,return_type='states')
tsdar_estimator = TSDAREstimator(tsdar_model)
ood_scores = tsdar_estimator.fit(data).ood_scores
state_centers = tsdar_estimator.fit(data).state_centers
hypersphere_embs = np.array(hypersphere_embs,dtype=object)
metastable_states = np.array(metastable_states,dtype=object)
ood_scores = np.array(ood_scores,dtype=object)
np.save(('hypersphere_embs.npy'), hypersphere_embs, allow_pickle=True)
np.save(('metastable_states.npy'), metastable_states, allow_pickle=True)
np.save(('ood_scores.npy'), ood_scores, allow_pickle=True)
np.save(('state_centers.npy'), state_centers)
torch.save(tsdar_model.lobe.state_dict(), 'model.pt')
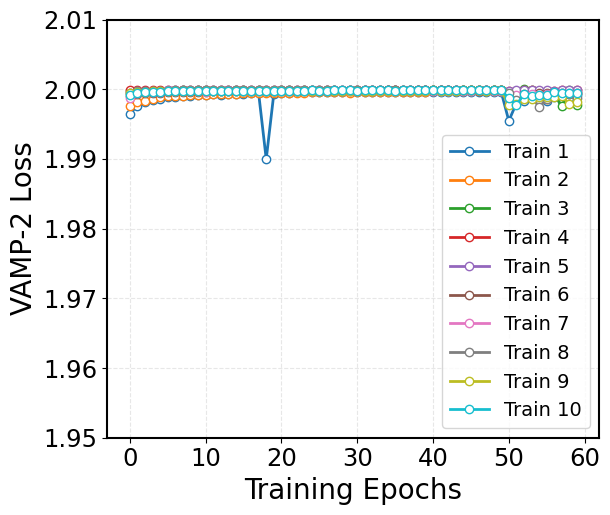
Visualize the VAMP-2 Loss:¶
The VAMP-2 loss is derived from the Variational Approach for Markov Processes, which aims to extract the slow collective variables from the data. Given an MD trajectory of length \(T\), a batch of transition pairs \(\{(x_t, x_{t+\tau})\}_{t=1}^b\) with lag time, \(\tau\), is sampled. This produces two batches of data: \(\mathbf{B} = [x_1, x_2, \dots, x_b]^T\) and \(\mathbf{\hat{B}} = [x_{1+\tau}, x_{2+\tau}, \dots, x_{b+\tau}]^T\), which are fed into two parallel network lobes with shared parameters. Each lobe outputs SoftMax-transformed basis functions (\(\chi\)) applied to the input features, yielding: \(\mathbf{X} = [\chi(x_1), \dots, \chi(x_b)]^T\) and \(\mathbf{Y} = [\chi(x_{1+\tau}), \dots, \chi(x_{b+\tau})]^T\). The remove-mean time-instantaneous (\(\bar{\mathbf{C}}_{00}\) and \(\bar{\mathbf{C}}_{11}\)) and time-lagged (\(\bar{\mathbf{C}}_{01}\)) correlation matrices can then be calculated as follows:
where \(\boldsymbol{\pi}_0\) and \(\boldsymbol{\pi}_1\) are mean vectors of \(\mathbf{X}\) and \(\mathbf{Y}\), respectively, given by: \(\boldsymbol{\pi}_0\) = \(\frac{1}{T - \tau} \mathbf{X}^T \mathbf{1}\) and \(\boldsymbol{\pi}_1\) = \(\frac{1}{T - \tau} \mathbf{Y}^T \mathbf{1}\). These correlation matrices are then used to calculate the VAMP-2 loss, which is defined as:
Minimizing this loss drives the model to learn latent features that capture the slow dynamical modes in the molecular system.
[22]:
val_vamp = []
for i in range(10):
j=i+1
file_path=f'./trained_model_examples/{j}/validation_vamp.npy'
dip = np.load(file_path)
val_vamp.append(dip)
# Define custom colors for the line and markers
line_color = 'royalblue'
marker_face = 'white'
# Plot with custom colors, line width, and markers
fig = plt.figure(figsize=(8, 6))
for idx, dip in enumerate(val_vamp):
plt.plot(dip, linewidth=2, marker='o', markersize=6, markerfacecolor=marker_face, linestyle='-', label=f'Train {idx + 1}')
# Set the axis labels
plt.xlabel('Training Epochs', fontsize=20)
plt.ylabel('VAMP-2 Loss', fontsize=20)
plt.yticks(np.arange(1.95, 2.011, 0.01))
plt.xticks(np.arange(0, 61, 10))
# Customize tick parameters for readability
plt.xticks(fontsize=17.5)
plt.yticks(fontsize=17.5)
plt.gca().set_box_aspect(0.85)
# Add a dashed grid to improve the readability of the plot
plt.grid(alpha=0.3, linestyle='--')
plt.legend(loc='lower right', fontsize=14, markerscale=1, ncol=1)
# Adjust the layout to ensure everything fits well
plt.tight_layout()
# Display the plot
plt.show()
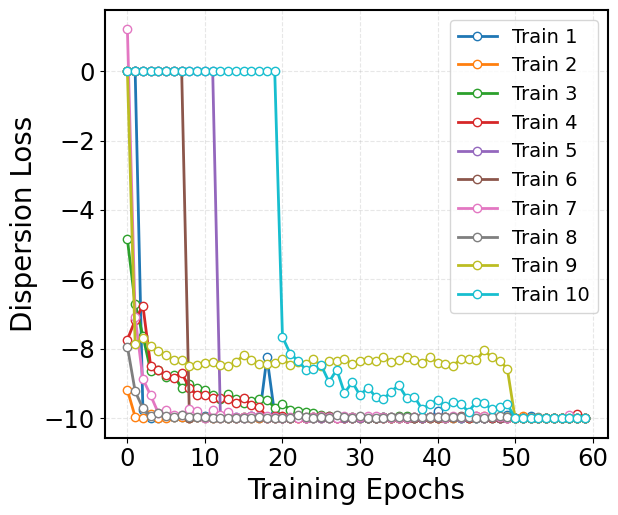
Visualize the Dispersion Loss:¶
While the VAMP-2 loss focuses on capturing the slow dynamics, it can sometimes result in a latent space where the features collapse to similar values. To counteract this, we incorporate a dispersion loss that encourages diversity in the latent space. One way to formulate the dispersion loss is by ensuring that the pairwise distances between latent representations are close to a target mean distance. The dispersion loss is defined as:
where:
\(C\) corresponds to the number of states.
\(\mu_i\) is a unit vector representing the mean direction of all conformations (i.e., the state center) in state \(i\).
\(\sigma\) is a scaling hyperparameter, which is specifically defined as 0.1.
\(\mathbf{1}_{\{j \neq i\}}\) is an indicator function that equals 1 when \(j \neq i\) (i.e., excluding self-similarity) and 0 when \(j = i\).
This loss penalizes deviations from the target dispersion, ensuring that the latent features remain well-separated and informative.
[23]:
# Define custom colors for the line and markers
line_color = 'royalblue'
marker_face = 'white'
#marker_edge = 'royalblue'
val_dip = []
for i in range(10):
j=i+1
file_path=f'./trained_model_examples/{j}/validation_dis.npy'
dip = np.load(file_path)
val_dip.append(dip)
plt.rcParams['font.size'] = 35
plt.figure(figsize=(8, 6))
for idx, dip in enumerate(val_dip):
plt.plot(dip, linewidth=2, marker='o', markersize=6, markerfacecolor=marker_face, linestyle='-', label=f'Train {idx + 1}')
# Set the axis labels
plt.xlabel('Training Epochs', fontsize=20)
plt.ylabel('Dispersion Loss', fontsize=20)
#plt.ylim(0, 2.25)
#plt.yticks(np.arange(0, 2.1, 0.5))
plt.xticks(np.arange(0, 61, 10))
# Customize tick parameters for readability
plt.xticks(fontsize=17.5)
plt.yticks(fontsize=17.5)
plt.gca().set_box_aspect(0.85)
plt.legend(loc='upper right', fontsize=14, markerscale=1, ncol=1)
# Add a dashed grid to improve the readability of the plot
plt.grid(alpha=0.3, linestyle='--')
# Adjust the layout to ensure everything fits well
plt.tight_layout()
# Display the plot
plt.show()
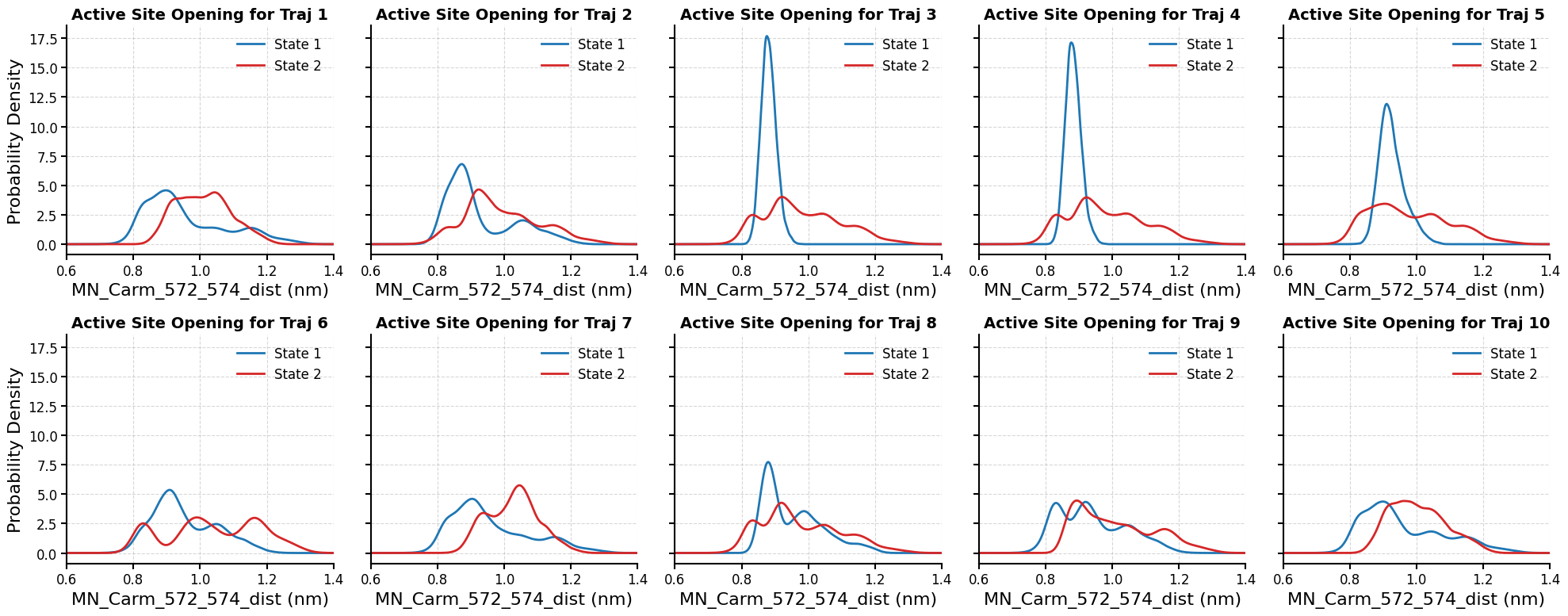
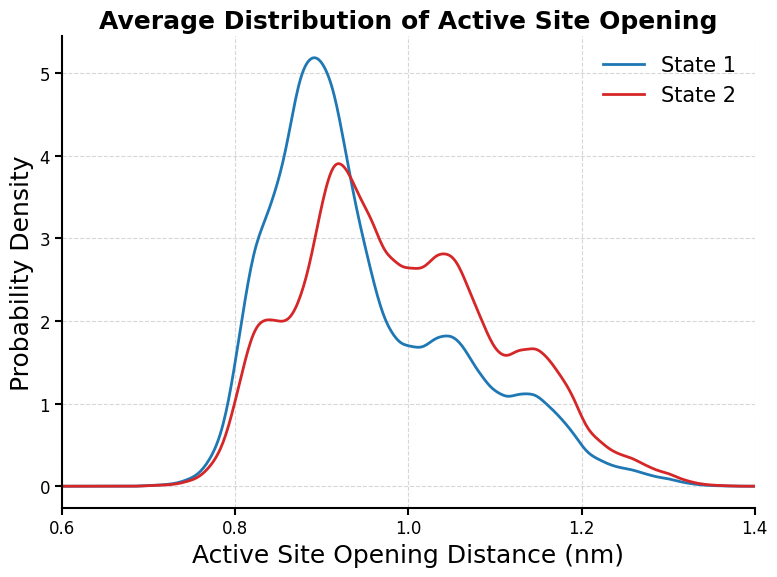
KDE Plots of Active Site Opening Distributions for Each State:¶
This code plots the distribution of the selected structural feature (MN_Carm_572_574_dist), which measures the active site opening, across metastable states in all 10 MD trajectories.
[25]:
import numpy as np
import matplotlib.pyplot as plt
from scipy.stats import gaussian_kde
import matplotlib as mpl
# Set styles
mpl.rcParams.update({
'font.size': 14,
'axes.labelsize': 16,
'axes.titlesize': 14,
'xtick.labelsize': 12,
'ytick.labelsize': 12,
'legend.fontsize': 12,
'lines.linewidth': 2,
'axes.linewidth': 1.5
})
fig, axes = plt.subplots(2, 5, figsize=(20, 8), sharey=True)
axes = axes.flatten()
for i in range(10):
ax = axes[i]
# Load state assignments
state_trajs = list(np.load(f'./trained_model_examples/{i+1}/metastable_states.npy', allow_pickle=True))
states = np.concatenate(state_trajs)
# Load features (assuming phy_coord is already defined in your environment)
features = np.concatenate(phy_coord)
# Separate by state
state0 = features[states == 0]
state1 = features[states == 1]
# Ensure consistent ordering (state 0 always to the left)
if np.mean(state0) > np.mean(state1):
state0, state1 = state1, state0
# KDE
kde0 = gaussian_kde(state0)
kde1 = gaussian_kde(state1)
xgrid = np.linspace(0.6, 1.4, 500)
# Plot KDEs with normalized weights
ax.plot(xgrid, kde0(xgrid), color='#1f77b4', label='State 1') # Blue
ax.plot(xgrid, kde1(xgrid), color='#d62728', label='State 2') # Red
ax.set_xlim(0.6, 1.4)
ax.set_xticks([0.6, 0.8, 1.0, 1.2, 1.4])
ax.set_xlabel('MN_Carm_572_574_dist (nm)')
if i % 5 == 0:
ax.set_ylabel('Probability Density')
ax.set_title(f'Active Site Opening for Traj {i+1}', weight='bold')
ax.tick_params(direction='out', length=5, width=1.5)
ax.spines['top'].set_visible(False)
ax.spines['right'].set_visible(False)
ax.legend(loc='upper right', frameon=False)
ax.grid(True, linestyle='--', alpha=0.5)
# Adjust spacing
plt.subplots_adjust(hspace=0.3, wspace=0.2)
plt.tight_layout()
plt.show()
[26]:
# Average KDE Plot
# Collect all state0 and state1 data across all trajectories
all_state0 = []
all_state1 = []
for i in range(10):
state_trajs = list(np.load(f'./trained_model_examples/{i+1}/metastable_states.npy', allow_pickle=True))
states = np.concatenate(state_trajs)
features = np.concatenate(phy_coord)
state0 = features[states == 0]
state1 = features[states == 1]
if np.mean(state0) > np.mean(state1):
state0, state1 = state1, state0
all_state0.append(state0)
all_state1.append(state1)
# Concatenate and compute average KDE
all_state0 = np.concatenate(all_state0)
all_state1 = np.concatenate(all_state1)
kde_avg0 = gaussian_kde(all_state0)
kde_avg1 = gaussian_kde(all_state1)
xgrid = np.linspace(0.6, 1.4, 500)
# Plot average KDEs
plt.figure(figsize=(8, 6))
plt.plot(xgrid, kde_avg0(xgrid), color='#1f77b4', label='State 1')
plt.plot(xgrid, kde_avg1(xgrid), color='#d62728', label='State 2')
plt.xlabel('Active Site Opening Distance (nm)', fontsize=18)
plt.ylabel('Probability Density', fontsize=18)
plt.title('Average Distribution of Active Site Opening', fontsize=18, weight='bold')
plt.legend(frameon=False, fontsize=15)
plt.xlim(0.6, 1.4)
plt.xticks([0.6, 0.8, 1.0, 1.2, 1.4])
plt.tick_params(direction='out', length=5, width=1.5)
plt.gca().spines['top'].set_visible(False)
plt.gca().spines['right'].set_visible(False)
plt.tight_layout()
plt.grid(True, linestyle='--', alpha=0.5)
plt.savefig("/Users/eshanig/Desktop/fig9B.png", dpi=300, bbox_inches='tight')
plt.show()
[ ]: